
The University of Bath, located in the United Kingdom, carried out research using Acconeer’s pulsed coherent radar (PCR) sensors.
The aim of this project was to determine the feasibility of using the PCR sensors for navigation and mapping. Techniques used in sonar technology were applied to these sensors to estimate distance travelled by an array of sensors. Data was gathered at different positions in 1 direction using these sensors and calculated correlation. Synthetic Aperture Radar (SAR) images were generated by these sensors, and besides distance travelled, the size and shape of obstacles could be determined.
The project concluded that the A121 sensors performed well at high correlation values, and it can be used to provide accurate distance estimates in 1 dimension.
Hardware
A111 and A121 sensors were utilized for this project, and lenses and lens holders were used to modify the beamwidth. These sensors are small and can measure pulses coherently. Coherence allows the sensors to measure the phase difference between the transmitted and received waves. The phase is a very accurate measurement of distances to the object. This feature is required for the localization and mapping solutions discussed in the project.
A111 sensors and lenses
In this project, four XR112 Radar Sensor Boards, one XC112 Connector Board and four LH112 lenses and holders were used. And these four XR112 Radar Sensor Boards and the XC112 Connector Board were connected simultaneously using a Raspberry Pi 3.
A121 sensors and lenses
At the time the research was conducted, A121 sensors were under development and were not available to purchase. Therefore, modified XR112 Radar Sensor Boards with A121 sensors were utilized. To implement this proof of concept using A121 sensors, one XE121 Evaluation Board, four XS121 Satellite Boards and four LH112 lenses and holders are necessary. A Raspberry Pi is needed to connect XE121 Evaluation Board and XS121 Satellite Boards.
Software
There are 3 parts to the module written for the project.
- init.py: Main functions, used for experiments, loading & saving data, and basic analysis
- sim.py: Simulation functions, used for creating and running simulations
- map.py: Mapping functions, used to create SAR images
Experimental Setup
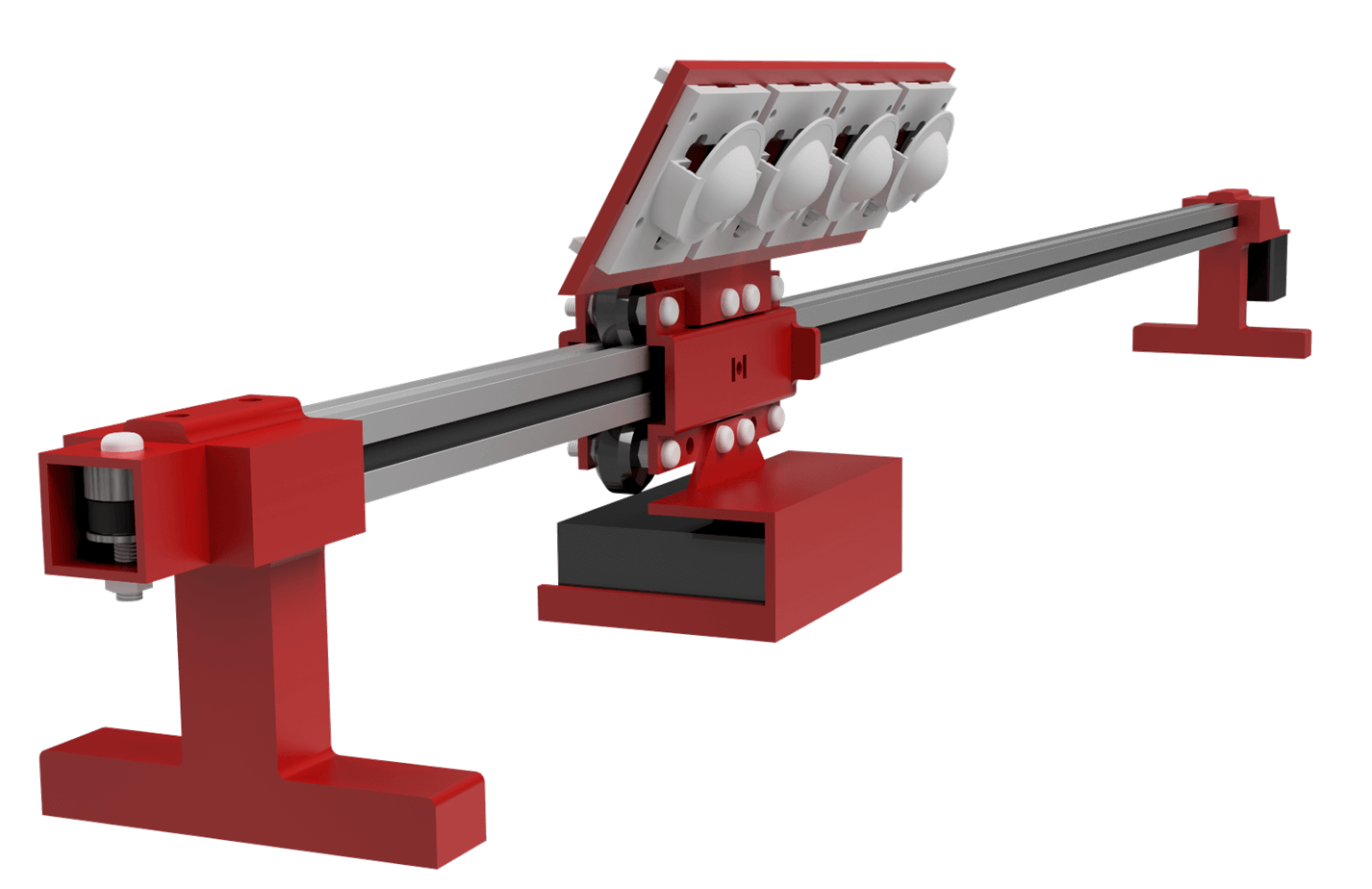
A test-rig was built to gather data from the sensors at different positions in 1 direction. The design consists of a wheeled carriage on a v-slotted aluminium extrusion. The carriage is positioned by a NEMA-17 stepper motor (RS components: 180-5279) and a toothed belt. This is a common design in 3D printers and small laser cutters where accurate positioning of a payload is required. A full CAD model was developed to aid design and manufacture.
In this picture, four XR112 Radar Sensor Boards, one XC112 Connector Board and four LH112 lenses and holders were used.
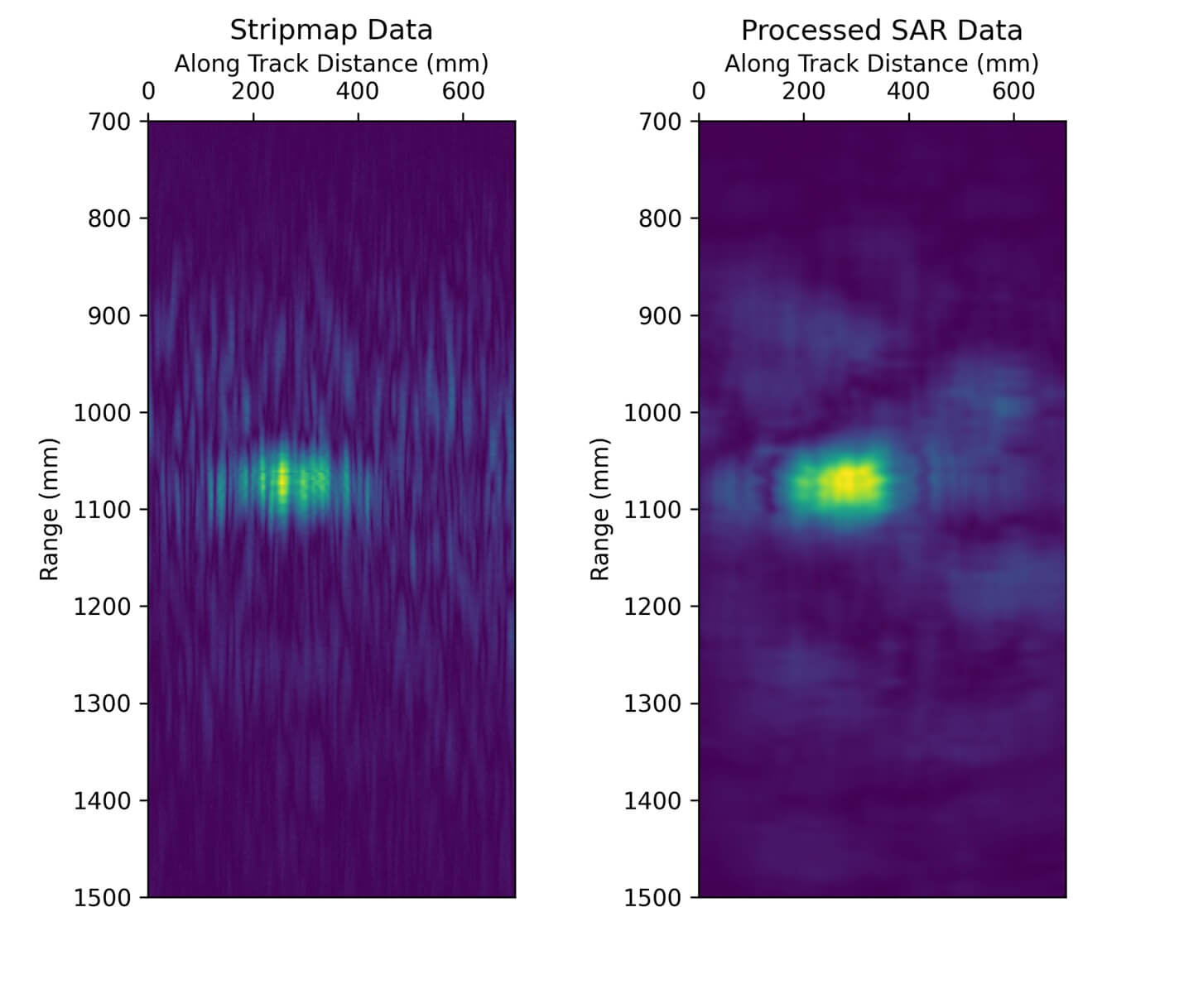
Synthetic Aperture Radar
Synthetic Aperture Radar (SAR) images are processed using delay-and-sum beamforming. It is seen that SAR imaging can determine the approximate size and shape of obstacles. This has potential applications in obstacle detection in robot navigation.
About the University of Bath
The University of Bath was established on Claverton Down in Bath in 1966 and the university campus is in the South West of England. They offer courses in engineering, humanities, management, science and social science. In the 2021/22 academic year, total 19,926 students enrolled: 3,854 undergraduates and 6,072 postgraduates. Two-thirds of undergraduates choose a placement or to study abroad in order to prepare for their careers.
More information
Try it on your own and get in touch
If you try this, or work on something else, we’d love to hear about your project! Please get in touch with us on innovation@acconeer.com.